Rotation-invariant HOG descriptors using Fourier analysis in polar and spherical coordinates
Abstract
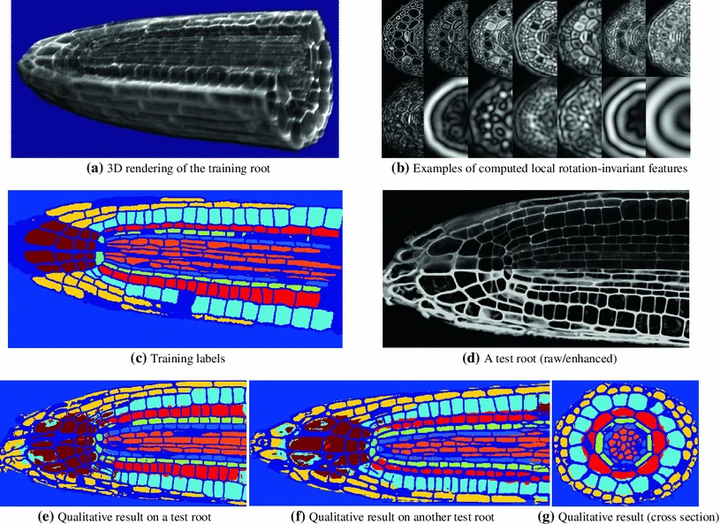
The histogram of oriented gradients (HOG) is widely used for image description and proves to be very effective. In many vision problems, rotation-invariant analysis is necessary or preferred. Popular solutions are mainly based on pose normalization or learning, neglecting some intrinsic properties of rotations. This paper presents a method to build rotation-invariant HOG descriptors using Fourier analysis in polar/spherical coordinates, which are closely related to the irreducible representation of the 2D/3D rotation groups. This is achieved by considering a gradient histogram as a continuous angular signal which can be well represented by the Fourier basis (2D) or spherical harmonics (3D). As rotation-invariance is established in an analytical way, we can avoid discretization artifacts and create a continuous mapping from the image to the feature space. In the experiments, we first show that our method outperforms the state-of-the-art in a public dataset for a car detection task in aerial images. We further use the Princeton Shape Benchmark and the SHREC 2009 Generic Shape Benchmark to demonstrate the high performance of our method for similarity measures of 3D shapes. Finally, we show an application on microscopic volumetric data.